MULTISTAGE GRAPH
SHORTEST PATH IN MULTISTAGE GRAPH
Description
This program calculates the shortest path from a given source node to a target node in a directed graph using a dynamic programming approach. The graph is represented as an adjacency matrix, where the user provides input for the number of vertices and the adjacency matrix values.
Problem Definition
- Input: The adjacency Cost Matrix.
- Output: Minimum cost path and Minimum Cost.
Video Explanation
Example
-
Input:
-
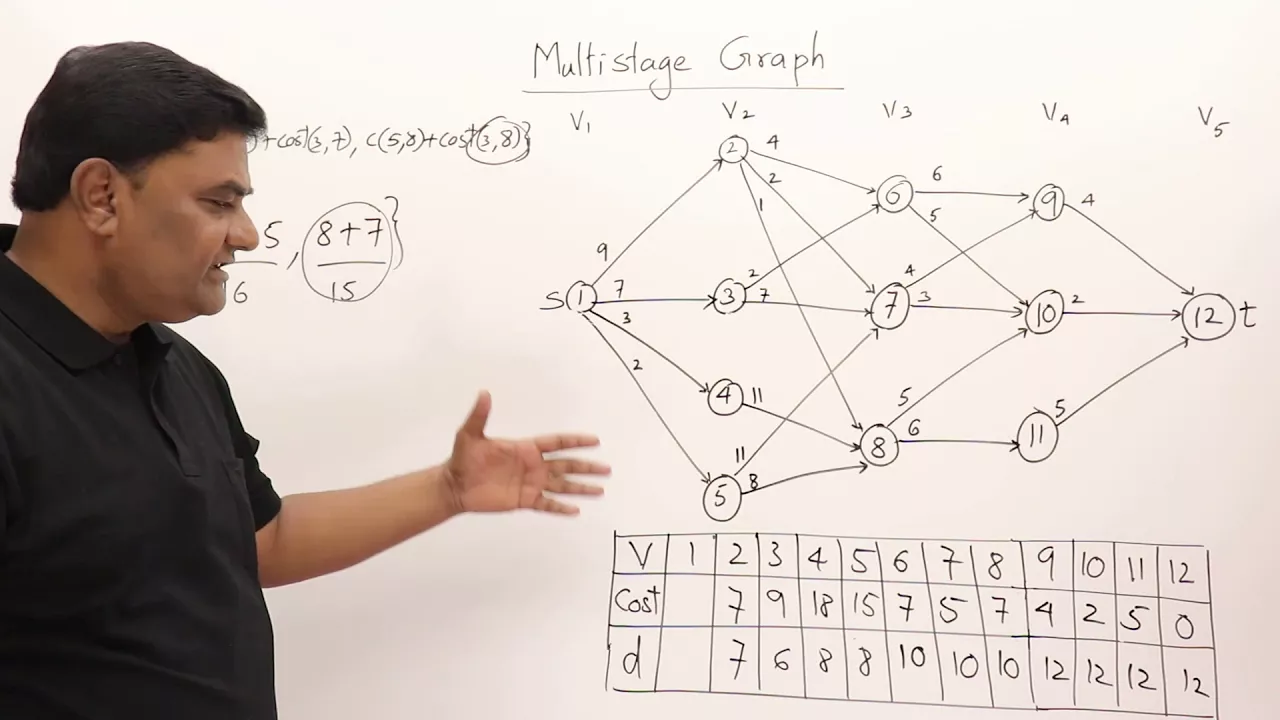
Enter the number of vertices in the graph: 12
Enter the adjacency matrix (use 99 for INF):
99 9 7 3 2 99 99 99 99 99 99 99
99 99 99 99 99 4 2 1 99 99 99 99
99 99 99 99 99 2 7 99 99 99 99 99
99 99 99 99 99 99 99 11 99 99 99 99
99 99 99 99 99 99 11 8 99 99 99 99
99 99 99 99 99 99 99 99 6 5 99 99
99 99 99 99 99 99 99 99 4 3 99 99
99 99 99 99 99 99 99 99 99 5 6 99
99 99 99 99 99 99 99 99 99 99 99 4
99 99 99 99 99 99 99 99 99 99 99 2
99 99 99 99 99 99 99 99 99 99 99 5
99 99 99 99 99 99 99 99 99 99 99 0Enter the source node: 1
Enter the target node: 12
-
-
Output:
- The shortest path distance from node 1 to node 12 is: 16
Path: 1 -> 2 -> 7 -> 10 -> 12.
- The shortest path distance from node 1 to node 12 is: 16
Diagrammatic represntation of the above example
Algorithm Overview
- Initialization:
The distance arraydist[]is initialized with INF for all nodes except the target node, which has a distance of0. This array will store the shortest known distances from each node to the target. The path arraypath[]is initialized to store the next node on the shortest path for each node. - Dynamic Programming Loop:
The function iterates from the target node backward to the source, evaluating each node's potential distance to the target by checking its connection to subsequent nodes. If the current distance from nodeito the target is greater than the distance from nodeitojplusdist[j](where j is a neighboring node), it updatesdist[i]and setspath[i]toj. - Path Construction:
If a valid path exists, the function prints the shortest distance from the source to the target. It then traces the path from the source to the target using thepath[]array and prints each node in the order they are visited.
Time Complexity
- O(n^2) - where
nis the total number of nodes in the multistage graph
C++ Implementation
#include <iostream>
#include <vector>
#include <climits>
#define INF 99
void shortestDist(const std::vector<std::vector<int>>& graph, int n, int source, int target) {
std::vector<int> dist(n + 1, INF), path(n + 1, -1);
dist[target] = 0;
path[target] = target;
for (int i = target - 1; i >= 1; i--) {
for (int j = i + 1; j <= n; j++) {
if (graph[i][j] != INF && dist[i] > graph[i][j] + dist[j]) {
dist[i] = graph[i][j] + dist[j];
path[i] = j;
}
}
}
if (dist[source] == INF) {
std::cout << "There is no path from node " << source << " to node " << target << "\n";
return;
}
std::cout << "The shortest path distance from node " << source << " to node " << target << " is: " << dist[source] << "\n";
std::cout << "Path: " << source;
int current = source;
while (current != target) {
current = path[current];
std::cout << " -> " << current;
}
std::cout << "\n";
}
int main() {
int n, source, target;
std::cout << "Enter the number of vertices in the graph: ";
std::cin >> n;
std::vector<std::vector<int>> graph(n + 1, std::vector<int>(n + 1));
std::cout << "Enter the adjacency matrix (use " << INF << " for INF):\n";
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
std::cin >> graph[i][j];
}
}
std::cout << "Enter the source node: ";
std::cin >> source;
std::cout << "Enter the target node: ";
std::cin >> target;
shortestDist(graph, n, source, target);
return 0;
}
Done with this topic? Mark it as complete to track your progress.